Overview
Apogy provides a series of built-in example Systems to illustrate and highlight its capabilities and features. These examples:
- Provide simple examples of simulated Systems.
- As recommended in the Apogy System Developer Guidelines, System EMF models are separate from their Apogy plugins.
- Include articulated and composites systems.
- Some Systems make use of the Environment attributes for simulation.
- Show various modeling patterns for integrating systems in Apogy.
These Systems, while fairly basic simulations of their real-world counterparts, show at a high level how to design a System and integrate it into Apogy. There are a large amount of variety in the examples, which include articulated and composite Systems. In addition, the examples leverage their respective Environment to facilitate the simulation. As suggested in the guidelines, each of the example Systems have their EMF meta-models separate and distinct from their Apogy (System) plug-ins. More than anything else, the examples highlight the recommended way to integrate new System into Apogy.
The Example Systems
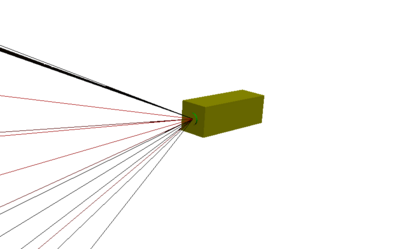
PTUDishAntennaApogySystem
| System Name: |
PTUDishAntennaApogySystem
|
| Description: |
A simulated antenna dish mounted on a pan-tilt unit. The antenna is made to track the Sun based on the worksite sky.
|
| Interface Class: |
org.eclipse.apogy.examples.antenna.PTUDishAntenna
|
| Apogy System File: |
org.eclipse.apogy.examples.antenna.apogy/model/PTUDishAntennaApogySystem.ss
|
| Subsystems: |
- None -
|

|
Simple Camera
| System Name: |
CameraApogySystem
|
| Description: |
A simple camera that can take snapshots. The simulated implementation return a different image (from a list of image file) every time a takeShapshot is commanded.
|
| Interface Class: |
org.eclipse.apogy.examples.camera.Camera
|
| Apogy System File: |
org.eclipse.apogy.examples.camera.apogy/model/CameraApogySystem.ss
|
| Subsystems: |
- None -
|
|
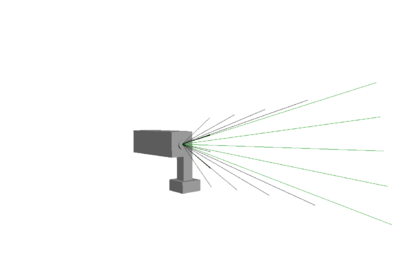
Pan & Tilt Camera
| System Name: |
PTUCameraApogySystem
|
| Description: |
A camera mounted on a pan-tilt unit. The simulated implementation return a different image (from a list of image files) every time a takeShapshot is commanded. The pointing of the camera is also simulated and has the camera move when commanded in pan and tilt angles.
|
| Interface Class: |
org.eclipse.apogy.examples.camera.PTUCamera
|
| Apogy System File: |
org.eclipse.apogy.examples.camera.apogy/model/PTUCameraApogySystem.ss
|
| Subsystems: |
- None -
|
|
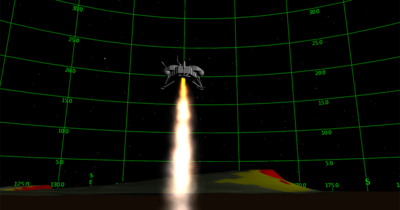
Flying Lander Vehicle
| System Name: |
LanderApogySystem
|
| Description: |
A simulated lander that can fly. The user can control the pitch and roll angular rates and control the engine throttle. Fuel usage is modeled (which changes the vehicle mass) and engine shuts off when empty. When used with a pose corrector, the lander legs will follow the surface of DEMs. Use it with hand controllers mapping to fly around !
|
| Interface Class: |
org.eclipse.apogy.examples.lander.Lander
|
| Apogy System File: |
org.eclipse.apogy.examples.lander.apogy/model/LanderApogySystem.ss
|
| Subsystems: |
- None -
|
|
Skid-Steered Wheeled Mobile Platform
| System Name: |
MobilePlateformApogySystem
|
| Description: |
A simulated four wheeled, skid-steered mobile platform. The simulated implementation has the wheels turning when motion is commanded, and the vehicle moves around. When used with a pose corrector, the vehicle's wheels will follow the surface of DEMs.
|
| Interface Class: |
org.eclipse.apogy.examples.lander.MobilePlateform
|
| Apogy System File: |
org.eclipse.apogy.examples.lander.apogy/model/MobilePlateformApogySystem.ss
|
| Subsystems: |
- None -
|

|
4 Degrees of Freedom Robotic Arm
| System Name: |
RoboticArmApogySystem
|
| Description: |
A robotic arm with four revolute joints. The simulated implementation can move the arm smoothly from one joint angle configuration to another. This system is an example on how articulated systems can be modelled.
|
| Interface Class: |
org.eclipse.apogy.examples.robotic_arm.RoboticArm
|
| Apogy System File: |
org.eclipse.apogy.examples.robotic_arm.apogy/model/RoboticArmApogySystem.ss
|
| Subsystems: |
- None -
|

|
Integrated Robotic Arm
| System Name: |
IntegratedRoboticArmApogySystem
|
| Description: |
An system that integrates the four degree of freedom arm with a Pan-Tilt unit mounted on its forearm.
|
| Interface Class: |
org.eclipse.apogy.examples.robotic_arm.RoboticArm
|
| Apogy System File: |
org.eclipse.apogy.examples.robotic_arm.apogy/model/RoboticArmApogySystem.ss
|
| Subsystems: |
RoboticArmApogySystem, PTUCameraApogySystem
|

|
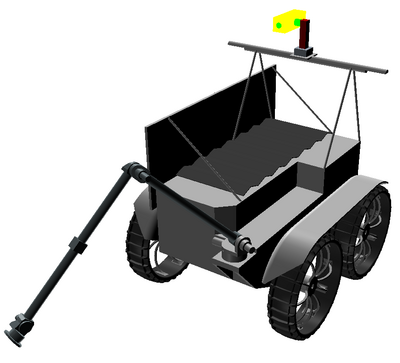
Integrated Rover
| System Name: |
RoverApogySystem
|
| Description: |
A simulated rover that is built on a skid-steered platform and includes a robotic arm (equipped with a Pan and Tilt camera) and a rover mounted Pan and Tilt camera. This is an example of a composite system.
|
| Interface Class: |
org.eclipse.apogy.examples.rover.Rover
|
| Apogy System File: |
org.eclipse.apogy.examples.rover.apogy/model/RoverApogySystem.ss
|
| Subsystems: |
IntegratedRoboticArm, MobilePlateform, PTUCamera
|
|







